- รายละเอียด
- หมวดหลัก: กองลาดตระเวนและเฝ้าตรวจทางอวกาศ
- หมวด: ความรู้ทางด้านเทคโนโลยีอวกาศ
วงโคจร
| วงโคจร (Orbit) คือ เส้นทางการเคลื่อนที่ของวัตถุหนึ่งรอบอีกวัตถุหนึ่ง ภายใต้อิทธิพลของแรงโน้มถ่วง (Gravity) สามารถอธิบายลักษณะของการเคลื่อนที่ในวงโคจรได้ตามตัวอย่างที่เรียกว่า Newton’s Cannonball ได้ดังต่อไปนี้ | |
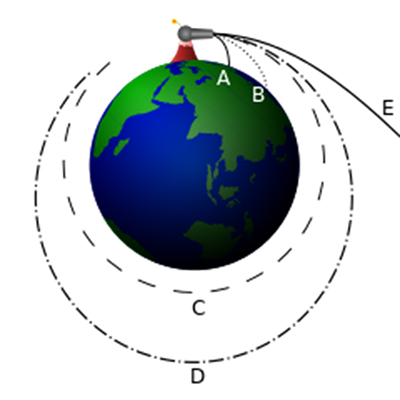 |
Cannonball สามารถเคลื่อนที่ได้ตามวิถีโค้งเพราะ แรงที่กระทำสองแรงด้วยกัน กล่าวคือ
1. แรงจากปืนใหญ่ ซึ่งก็คือความเร็วต้น (Initial Velocity) 2. แรงจากแรงโน้มถ่วงของโลก ซึ่งทำให้สามารถแบ่งเป็นกรณีศึกษาได้ 5 กรณี ดังต่อไปนี้ |
|
กรณี A Cannonball ถูกยิงด้วยความเร็วต้นที่ต่ำ ทำให้การเคลื่อนที่ของ Cannonball โค้งลงและตกสู่พื้นโลก
กรณี B Cannonball ถูกยิงด้วยความเร็วต้นที่สูงขึ้น ทำให้สามารถเคลื่อนที่ไปได้ไกลมากขึ้น แต่ก็ยังตกลงสู่พื้นโลกในระยะเวลาที่เท่ากับในกรณี A
กรณี C Cannonball ถูกยิงด้วยความเร็วต้นที่เหมาะสมพอดี (Circular Velocity) ทำให้ Cannonball เคลื่อนที่เป็นลักษณะวงโคจรรูปวงกลมรอบโลกโดยไม่ตกลงสู่พื้นโลกและเคลื่อนที่ได้ไปตามความโค้งของเปลือกโลกอย่างต่อเนื่อง
กรณี D Cannonball ถูกยิงด้วยความเร็วต้นที่เพิ่มขึ้นเล็กน้อยจากในกรณี C ทำให้ Cannonball เคลื่อนที่เป็นลักษณะวงโคจรรูปวงรี (Elliptical Orbit)
กรณี E Cannonball ถูกยิงด้วยความเร็วต้นที่เพิ่มขึ้นจนถึงความเร็วที่เรียกว่า Escape Velocity ทำให้ Cannonball เคลื่อนที่เป็นลักษณะวงโคจรรูปพาราโบลา และเมื่อเพิ่มความเร็วต้นขึ้น Cannonball จะเคลื่อนที่เป็นลักษณะวงโคจรรูปไฮเปอร์โบลา |
|
|
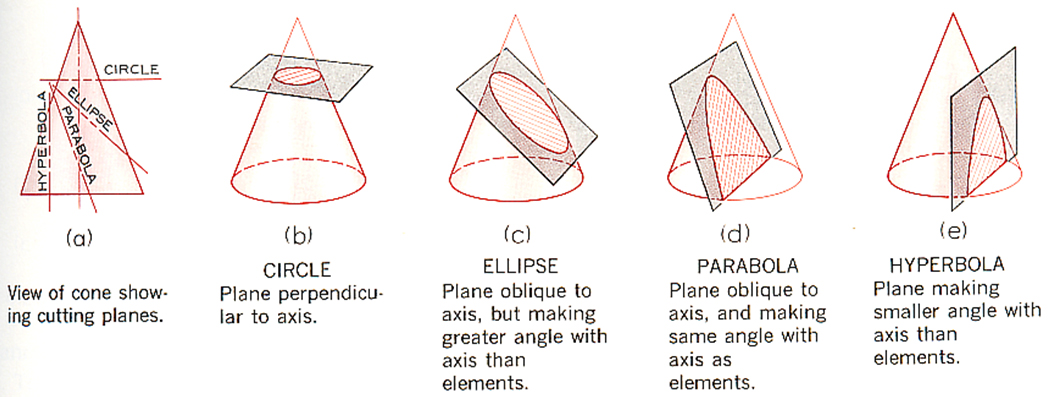
จะสังเกตได้ว่า ไม่ว่าความเร็วต้นของ Cannonball จะมีค่าเท่าใด ลักษณะวงโคจรจะมีลักษณะเป็นรูปวงกลม วงรี พาราโบลา หรือไฮเปอร์โบลา อย่างใดอย่างหนึ่งเท่านั้น ซึ่งทั้ง 4 รูปดังกล่าวนี้ เรียกว่า ภาพตัดกรวย (Conic Section) โดยจะไม่มีการเคลื่อนที่แบบอื่นใดที่นอกเหนือไปจากลักษณะการเคลื่อนที่ที่เกิดจากภาพตัดกรวยนี้ |
|
 |
|
| กฎของนิวตัน
1. Newton’s First Law of Motion กฎข้อแรกของนิวตันกล่าวไว้ว่า “A body continues in its state of rest, or of uniform motion in a straight line, unless compelled to change that state by forces impressed upon it.” หมายถึง วัตถุหนึ่งจะอยู่นิ่งหรือเคลื่อนที่แบบเส้นตรงด้วยความเร็วคงที่ตลอดไป ถ้าไม่มีแรงภายนอกมากระทำกับวัตถุนั้นทำให้วัตถุเคลื่อนที่หรือเปลี่ยนแปลงความเร็วและทิศทางการเคลื่อนที่ กฎข้อแรกสามารถอธิบายการเคลื่อนที่ในลักษณะวงโคจรรูปแบบต่าง ๆ ของดาวเคราะห์หรือดาวเทียมที่มีลักษณะที่ไม่เป็นเส้นตรง ซึ่งแสดงว่าต้องมีแรงอื่นเข้ามากระทำกับวัตถุดังกล่าวทำให้การเคลื่อนที่มีลักษณะเป็นเส้นโค้ง โดยแรงต้านการเคลื่อนที่ของวัตถุที่อยู่นิ่งหรือเคลื่อนที่แบบเส้นตรงด้วยความเร็วคงจะมีค่าที่แตกต่างกันขึ้นอยู่กับตัวแปรที่เรียกว่าโมเมนตัม |
|
|
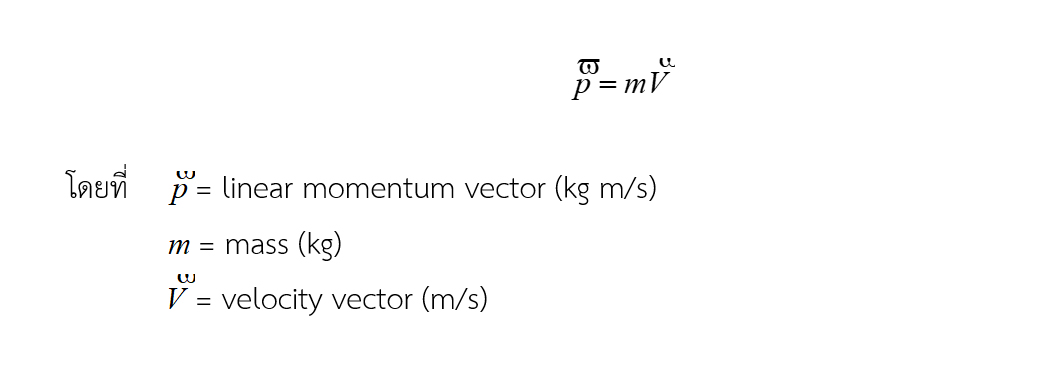
โมเมนตัม คือ ปริมาณของแรงต้านของวัตถุที่เคลื่อนที่แบบเส้นตรงด้วยความเร็วคงที่ให้มีการเปลี่ยนแปลงความเร็วหรือทิศทางในการเคลื่อนที่ มีอยู่ด้วยกัน 2 ชนิด ได้แก่ 1. โมเมนตัมเชิงเส้น (Linear Momentum) คือ ผลคูณระหว่างมวลและความเร็วของวัตถุ |
|
 |
|
|
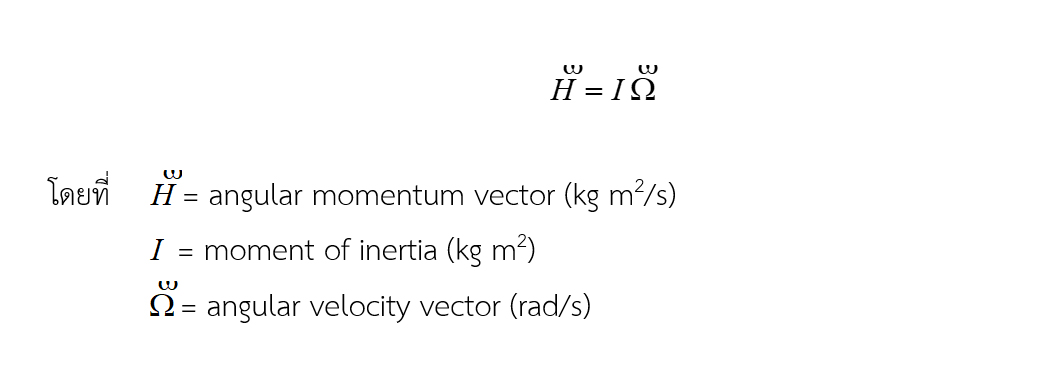
2. โมเมนตัมเชิงมุม (Angular Momentum) คือ ปริมาณของแรงต้านของวัตถุที่กำลังหมุนอยู่ให้มีการเปลี่ยนแปลงความเร็วหรือทิศทางในการหมุน เป็นผลคูณระหว่างโมเมนต์ความเฉื่อยและความเร็วเชิงมุมของวัตถุ |
|
 |
|
|
เราสามารถคำนวณหาโมเมนตัมเชิงมุมได้อีกวิธีหนึ่งซึ่งเปรียบเทียบให้วัตถุหมุนรอบแกนกลางอยู่ที่ปลายเชือกเสมือนกับการเคลื่อนที่ของดาวเคราะห์ กล่าวคือ |
|
|
|
|
|
2. Newton’s Second Law of Motion กฎข้อสองของนิวตันกล่าวไว้ว่า “The time rate of change of an object’s momentum is equal to the applied force.” หมายถึง อัตราการเปลี่ยนแปลงโมเมนตัมของวัตถุแปรผันตรงกับแรงที่กระทำต่อวัตถุนั้น กล่าวคือ ถ้าต้องการเปลี่ยนแปลงโมเมนตัมเร็วก็จะต้องใช้แรงกระทำที่สูง และถ้าต้องการเปลี่ยนแปลงโมเมนตัมอย่างช้าจะสามารถใช้แรงกระทำที่ลดน้อยลงในระยะเวลาที่นานขึ้นได้ ซึ่งสามารถเขียนได้เป็นสมการ |
|
 |
|
|
และสามารถแสดงตามกฎข้อสองของนิวตันได้ว่า |
|
|
|
|
|
3. Newton’s Third Law of Motion กฎข้อสามของนิวตันกล่าวไว้ว่า “When body A exerts a force on body B, body B will exert an equal, but opposite force on body A.” หรือแรงกิริยาเท่าแรงปฏิกิริยา โดยนิวตันได้ค้นพบว่าแรงปฏิกิริยาจะมีปริมาณที่เท่ากับแรงกิริยาแต่มีทิศทางตรงกันข้าม ซึ่งกฎข้อสามของนิวตันได้นำไปสู่การค้นพบกฎความโน้มถ่วงสากลของนิวตัน (Newton’s Universal Law of Gravitation) ที่ว่า “The force of gravity between two bodies is directly proportional to the product of their two masses and inversely proportional to the square of the distance between them.” ซึ่งสามารถเขียนเป็นสมการได้ดังนี้ |
|
|
|
|
|
เมื่อนำสมการดังกล่าวมาพิจารณาร่วมกับกฎข้อที่สองของนิวตันทำให้สามารถคำนวณค่าความเร่งเนื่องจากแรงดึงดูดของโลก (g) ได้ดังนี้ |
|
|
|
|
|
ที่มาของบทความ Jerry John Sellers, “Understanding Space”, McGraw-Hill International Editions, Third edition, 2011 |
|
|
เรียบเรียงโดย : น.ท.อิทธิ ยุทธยานนท์ |
|
- รายละเอียด
- เขียนโดย ร.ท.สุทธิพงษ์ โตสงวน
- หมวดหลัก: กองลาดตระเวนและเฝ้าตรวจทางอวกาศ
- หมวด: ความรู้ทางด้านเทคโนโลยีอวกาศ
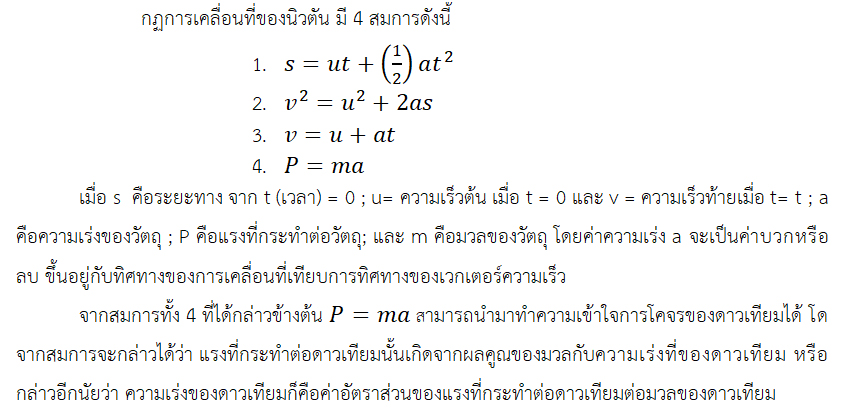
| ตามกฎพื้นฐานของกลศาสตร์ท้องฟ้า โดยเริ่มต้นจากกฎของการเคลื่อนที่ของนิวตัน ที่จะอธิบายการเคลื่อนที่ของวัตถุ ซึ่งจะสามารถพิจารณาแรงต่าง ๆ ที่กระทำต่อดาวเทียมได้ |
 |
 |
|
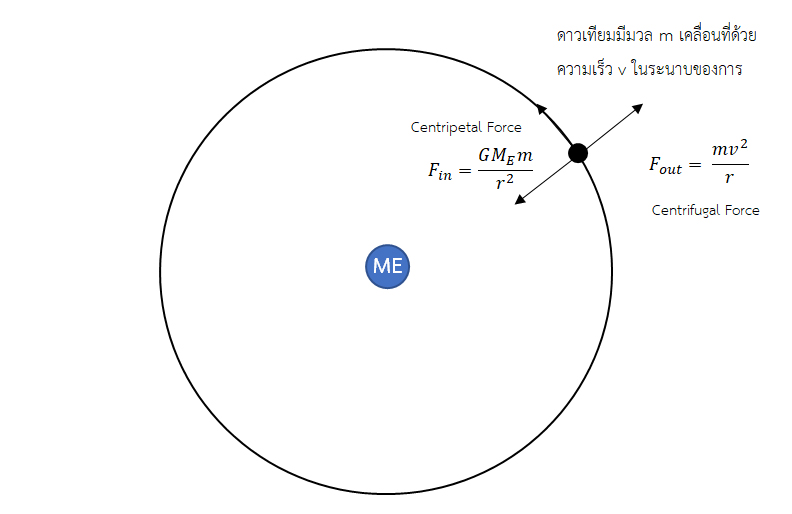
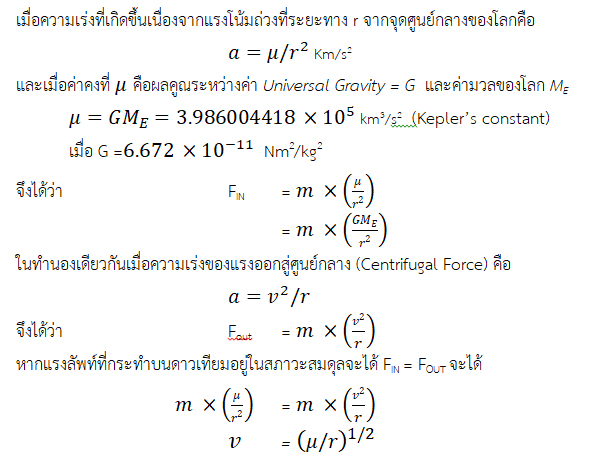
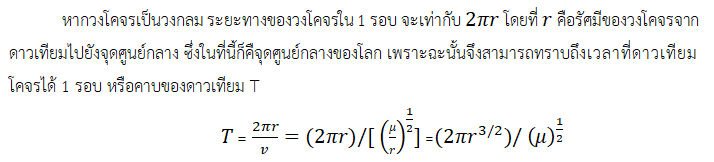
แรงที่กระทำต่อดาวเทียมในวงโคจรคงที่รอบโลกตามรูปที่ที่แสดงนั้น จะมีแรงที่กระทำต่อดาวเทียมคือ แรงที่เกิดจากอิทธิพลของแรงโน้มถ่วง ซึ่งจะแปรผกผันตามระยะห่างระหว่างจุกศูนย์กลางโลกและดาวเทียมกำลังสอง โดยทิศทางของแรง Fin จะเข้าสู่ศูนย์กลางของโลก และในส่วน Fout ของแรงที่มีทิศทางตรงข้ามกับแรง Fin เป็นแรงที่แปรผันตรงกับความเร็วของดาวเทียมยกกำลังสอง ซึ่งหากทั้งแรงทั้งสองมีขนาดเท่ากัน จะทำให้ดาวเทียมอยู่ในสภาวะ “free fall” |
 |
 |
|
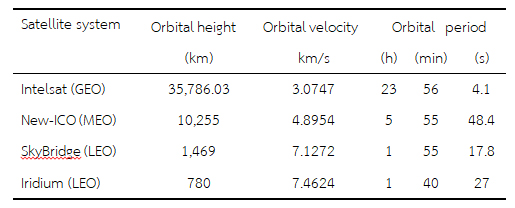
ตารางแสดงค่าความเร็ว คาบ ของระบบดาวเทียมแบบ GEO, MEO, LEO ที่โคจรรอบโลก |
 |
|
ค่าเฉลี่ยรัศมีโลก = 6378.137 กม. และรัศมีของวงโคจร GEO จากจุดศูนย์กลางโลก = 42,164.17 km |
|
ระบบพิกัดคาร์ทีเซียนแสดงถึงความสัมพันธ์ระหว่างโลกและดาวเทียม |
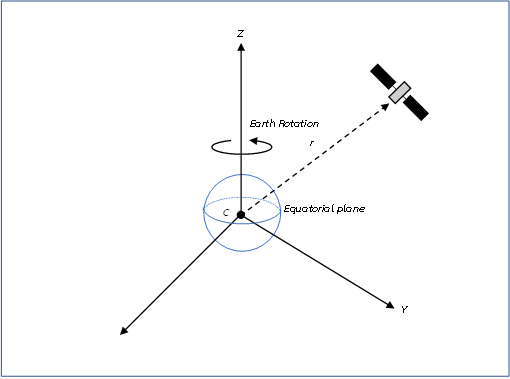 |
| ทิศทางการหมุนของโลกตามแนวแกน CZ โดยจุด C คือจุดศูนย์กลางของโลก CZ มีทิศทางผ่านขั้วโลกเหนือ แกน CX, CY, CZ ต่างตั้งฉากซึ่งกันและกัน (Orthogonal axes) แกน CX, CY มีทิศทางเส้นศูนย์สูตรของโลก และเวกเตอร์คือเวิกเตอร์ทิศทางของดาวเทียมเทียบกับโลก |
|
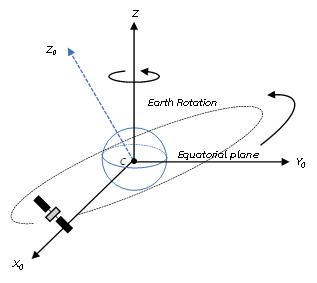
ระนาบการโคจรของดาวเทียม (Orbital Plane) |
 |
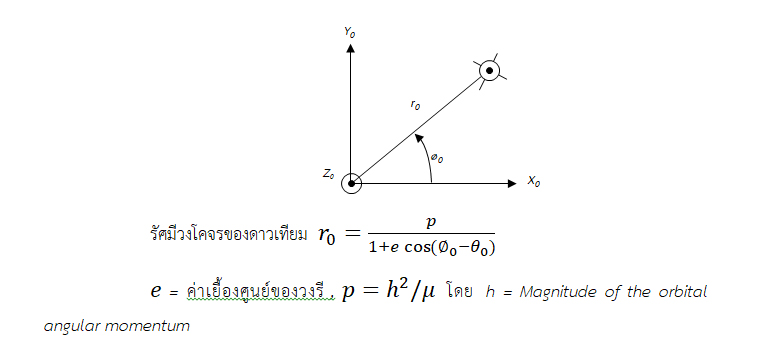
| พิกัดเชิงมุมของระนาบการโคจรของดาวเทียม (Polar coordinate system) |
 |
| กฎการเคลื่อนที่ของดาวเคราะห์ของเคปเลอร์ |
| 1. วงโคจรของวัตถุขนาดเล็กที่โคจรรอบวัตถุที่ใหญ่กว่าจะเป็นวงรีเสมอ ด้วยจุดศูนย์กลางของมวลวัตถุขนาดใหญ่กว่าคือหนึ่งในสองของจุดโฟกัส (Foci) |
| 2. พื้นที่ของการกวาดวงโคจรจะมีขนาดเท่ากัน ณ เวลาของการโคจรเท่ากัน |
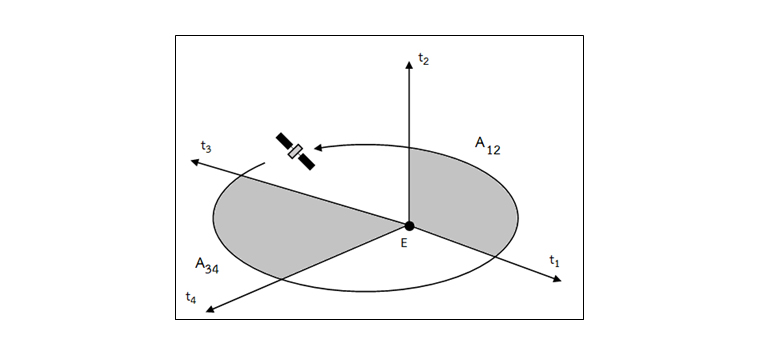 |
| จากรูป ส่วนที่แรเงาเป็นพื้นที่การกวาดโดยดาวเทียม ส่วนแรกจะเป็นส่วนที่ดาวเทียมโคจรใกล้โลก (Perigee) และอีกส่วนของพื้นที่ที่เกิดจากการโคจรของดาวเทียม ณ จุดที่อยู่ห่างโลก (Apogee) |
 |
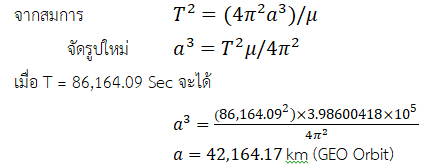
| 3. คาบของการเคลื่อนที่ยกกำลังสองจะแปรผันโดยตรงกับค่าของกำลังสามของความยาวแกนหลัก (Major Axes) ตามสมการ |
|
การระบุตำแหน่งดาวเทียมเมื่อเทียบกับโลก |
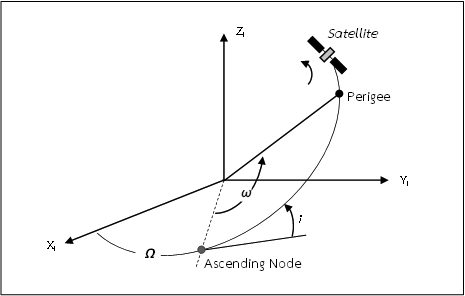 |
| เมื่อดาวเทียมเคลื่อนที่ผ่านระบบของแนวศูนย์สูตรของโลก ค่า Ω คือค่าไรต์แอสเซนชันของ Ascending node, มุม i คือมุมระหว่างระนาบของเส้นศูนย์สูตรและระนาบของการโคจร และมุม ω คือมุมระหว่างจุด Perigee และระนาบเส้นศูนย์สูตร |
|
ตัวอย่างการคำนวณรัศมีการโคจรขอดาวเทียมจากสมการ |
| หากการโคจรของดาวเทียมรอบโลกใช้เวลา 1 รอบคือ 23 ชั่วโมง 56 นาที 4.09 วินาที จะแสดงว่าดาวเทียมนั้นมีรัศมีการโคจรคือ 42,164.17 กิโลเมตร |
 |
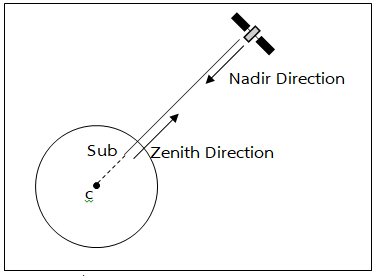
| การกำหนดมุมมอง (Look Angle Determination) |
| ระบบพิกัดที่ใช้สำหรับการตั้งสายอากาศจากสถานีภาคพื้นเพื่อทำการติดต่อสื่อสารกับดาวเทียมนั้นเรียกว่า “มุมมอง (Look Angles)” ซึ่งส่วนใหญ่จะแสดงเป็นมุมกวาด (Azimuth : Az) หรือมุมเงย (Elevation : El) |
| จุดย่อยดาวเทียม หรือ The Subsatellite point คือจุดที่อยู่บนพื้นผิวโลกที่อยู่ในแนวเดียวระหว่างจุกศูนย์กลางของโลกไปยังดาวเทียม ซึ่งเรียกว่า Nadir |
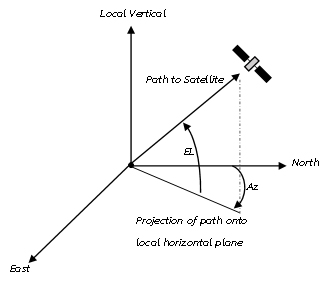 |
| จากรูปแสดงการกำหนดมุม El และ Az โดย El คือมุมที่วัดจากระนาบเส้นขอบฟ้าไปยังดาวเทียม ส่วน Az คือมุมที่วัดระหว่างทิศเหนือ (True North) มาทางทิศตะวันออกกับเส้นเงาของทิศทางดาวเทียมบนระนาบเส้นขอบฟ้า |
|
|
|
รูปแสดง Subsatellite และ Nadir |
| ดาวโหลดเอกสาร |
- รายละเอียด
- เขียนโดย ร.ต.กันต์ จุลทะกาญจน์
- หมวดหลัก: กองลาดตระเวนและเฝ้าตรวจทางอวกาศ
- หมวด: ความรู้ทางด้านเทคโนโลยีอวกาศ
| อวกาศคือที่แห่งหนึ่งที่มีพื้นที่มหาศาล สำหรับอวกาศแล้ว สิ่งที่เรานึกถึงได้ คือ ยานอวกาศโคจรรอบโลก โลกโคจรรอบดวงอาทิตย์ ทำให้คิดว่าอวกาศนั้นไกลเกินกว่าที่เราจะนึกคิดได้ ถึงจะเป็นเรื่องจริงแต่อวกาศนั้นอยู่เพียงแค่เหนือหัวเพียงไม่กี่ร้อยกิโลเมตร โดยปกติการวางแผนเดินทางไปท่องเที่ยว ต้องตรวจสอบสภาพอากาศและสภาพแวดล้อมในพื้นที่นั้นก่อนเดินทางเพื่อเตรียมพร้อมรับมือเช่นเดียวกับการวางแผนเดินทางไปในอวกาศ การศึกษาสภาพแวดล้อมทางอวกาศเป็นสิ่งที่ต้องคำนึงถึงอย่างแรกก่อนที่จะวางแผนการเดินทางไปอวกาศ ในภารกิจส่งคนขึ้นไปในอากาศ หรือแม้กระทั่งวัตถุที่ส่งขึ้นไปด้วยเหตุผลอะไรก็ตาม |
| อวกาศอยู่ที่ไหน? |
| ปัญหาเกิดขึ้นจากการหาคำจำกัดความของอวกาศเพราะไม่มีเส้นแบ่งให้เห็นเหมือนเขตแดนทางภูมิศาสตร์ชัดเจน โดยองค์การบริหารการบินและอวกาศแห่งชาติ (National Aeronautics and Space Administration, NASA) ได้ให้คำจำกัดความไว้ว่า “อวกาศคือพื้นที่เหนือชั้นบรรยากาศ” เพราะชั้นบรรยากาศคือสิ่งที่แยกออกจากโลกกับอวกาศ ดังนั้นจึงมีคำถามต่อไปว่าขอบชั้นบรรยากาศของโลกอยู่ที่ไหน เริ่มต้นโดยทางกองทัพอากาศสหรัฐ (US Air Force) สหพันธ์การบินของสหรัฐ (FAA) และ NASA กำหนดความสูงที่ 92.6 กม. เป็นระดับความสูงในการเดินทางของนักบินอวกาศเพื่อที่จะได้เครื่องหมายปีกนักบินอวกาศ แต่ก็ยังไม่เป็นข้อตกลงทางสากล จนทางสหพันธ์กีฬาทางอากาศโลก (World Air Sport Federation) มีหน้าที่รับรองสถิติเกี่ยวกับกิจการการบินในระดับสูง ได้ยืนยันและตั้งขอบชั้นความสูงในชั้นบรรยากาศโลกที่ 100 กม. จากระดับน้ำทะเล อ้างอิงจากค่าปริมาณอากาศที่สามารถใช้ทำการบินได้เพียงพอ (ความสูงไม่เกิน 80-100 กม.) ซึ่งใช้เป็นค่ามาตรฐานของโลก |
| ในทางปฏิบัติ การเดินทางอวกาศจะต้องอยู่ในความสูงที่วัตถุสามารถเดินทางโคจรรอบโลกได้ ต้องมีความสูง 131 กม.จากพื้นโลกโดยความสูงนี้จะทำให้โคจรได้ไม่กี่รอบ ก่อนที่จะแรงต้านจากชั้นบรรยากาศ (Atmospheric Drag) ดึงลงไปสู่พื้นโลก |
| ระบบสุริยะจักรวาล |
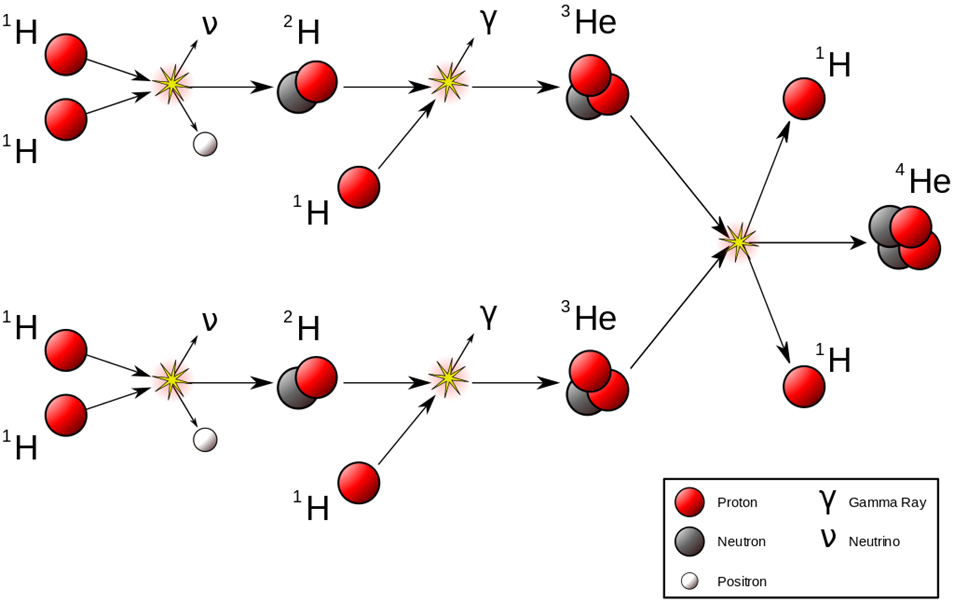
| หากจะกล่าวถึงระบบสุริยะจักรวาลแล้ว วัตถุที่มีผลต่อระบบสุริยะมากที่สุดคือ ดวงอาทิตย์ ดวงอาทิตย์ให้ความสว่างแก่ดาวเคราะห์รวมถึงโลก พลังงานที่ใช้เกิดจากการฟิวชั่นของไฮโดรเจน 600 ล้านตันต่อวินาที ผลลัพท์ที่ได้จากกระบวนการฟิวชั่น (Fusion process) คือ คลื่นแม่เหล็กไฟฟ้า (Electromagnetic Radiation, EM) และ อนุภาคที่มีประจุ (Charged Particle) |
 |
|
ภาพ 1.2 ลักษณะของกระบวนการฟิวชั่นของอะตอมไฮโดรเจนที่เกิดในดวงอาทิตย์ |
|
|
- รายละเอียด
- เขียนโดย ร.อ.ชาคริต จันทมิตร
- หมวดหลัก: กองลาดตระเวนและเฝ้าตรวจทางอวกาศ
- หมวด: ความรู้ทางด้านเทคโนโลยีอวกาศ
|
1. ลักษณะทั่วไปของดาวเทียม NOAA |
| NOAA (National Oceanic and Atmospheric Administration) เป็นชื่อที่ใช้เรียกดาวเทียมขององค์กร NOAA ของสหรัฐ ชื่อดาวเทียมคือ Advanced Television Infrared Observation Satellite ย่อเป็น TIROS-N หรือ ATN ซึ่งเป็นดาวเทียมสำรวจอุตุนิยมวิทยา ดาวเทียม NOAA เป็นดาวเทียมที่มี ระบบการทรงตัวแบบ Three-Axis-Stabilized โคจรรอบโลกที่ความสูง 830 - 870 กิโลเมตร มีวงโคจรแบบสัมพันธ์กับดวงอาทิตย์ (Sun Synchronous Orbit) คือมีวงโคจรในแนวเหนือใต้ ดาวเทียมในชุดนี้ จะทำงานพร้อมกัน 2 ดวง เพื่อให้ได้ข้อมูลอุตุนิยมวิทยาในบริเวณต่าง ๆ ทุก 6 ชั่วโมง ดวงหนึ่งจะตัดแนวเส้นศูนย์สูตรจากเหนือลงใต้เวลา 7.30 น. (เรียก Morning Orbit มีระดับวงโคจรที่ 830 กิโลเมตร) อีกดวง จะตัดแนวเส้นศูนย์สูตรจากเหนือลงใต้เวลา 13.40 น.(เรียก Afternoon Orbit มีระดับวงโคจรที่ 870 กิโลเมตร) มีเครื่องรับรู้ (Sensors) ระบบ AVHRR (Advanced Very High Resolution Radiometer), HIRS/2 (High Resolution Infrared Radiation Sounder), SSU (Stratospheric Sounding Unit) และ MSU (Microwave Sounding Unit) |
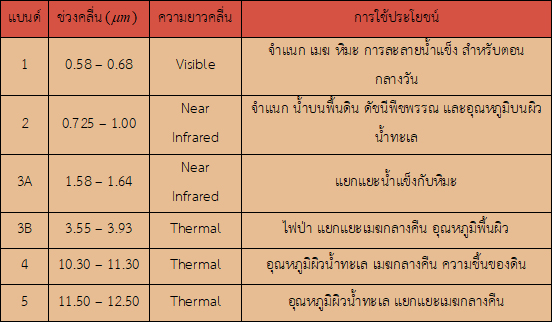
| อุปกรณ์ถ่ายภาพบนดาวเทียม NOAA คือ Advanced Very High Resolution Radiometer (AVHRR) จะทําการถ่ายภาพในช่วงคลื่นตามองเห็น (Visible Wavelength) และคลื่นพลังงานความร้อนในช่วงอินฟราเรด เพื่อใช้ในการตรวจวัดไอน้ำในบรรยากาศ มีความละเอียดภาพ 1 กิโลเมตร ความกว้างของการถ่ายภาพ 2,600 กิโลเมตร ซึ่งทํางานโดยอาศัยหลักการสะท้อนที่แตกต่างกันของคลื่นโดยมี 6 แบนด์ของ ความยาวคลื่นที่ประกอบกันเพื่อสร้างภาพที่ต้องการ |
|
ตารางที่ 1-1 แบนด์ความยาวคลื่น |
 |
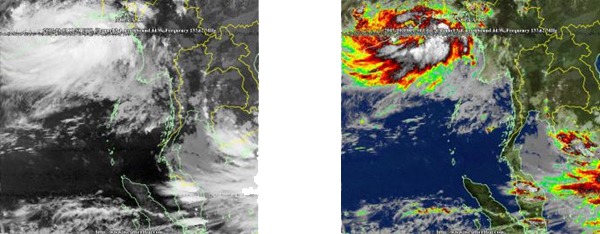
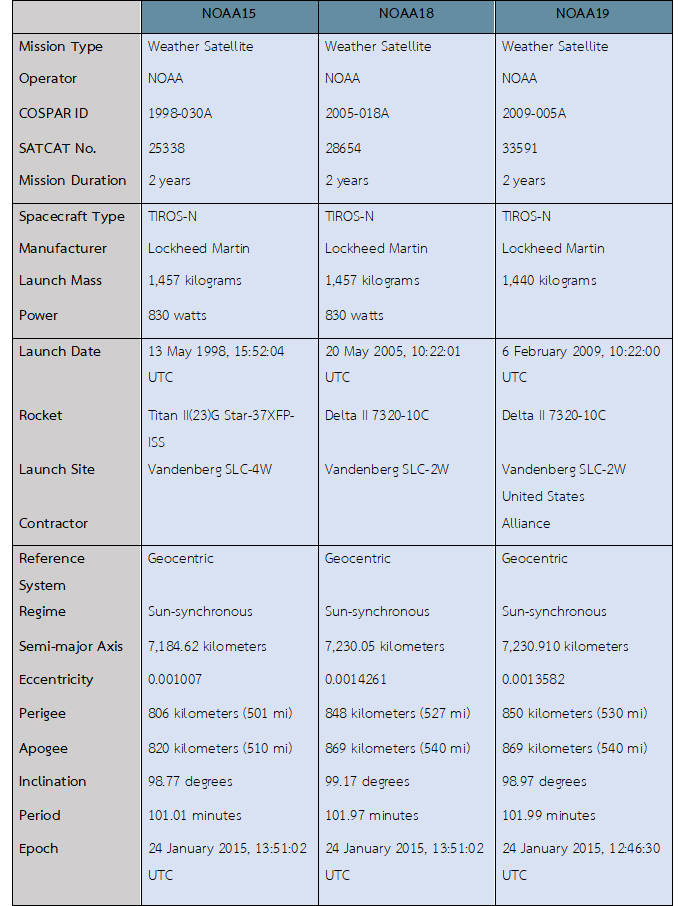
| สำรับระบบการรับสัญญาณดาวเทียม NOAA จะส่งสัญญาณภาพแบบ Automatic Picture Transmission (APT) ซึ่งเป็นภาพขาวดำ 2 ภาพ คือ ภาพที่มองเห็นด้วยตาและภาพรังสีอินฟราเรด มีขนาดความละเอียดของภาพเท่ากับ 4 กิโลเมตร โดยใช้ความถี่ 137 MHz และจะส่งสัญญาณภาพแบบ High Resolution Picture Transmission (HRPT) มีขนาดความละเอียดของภาพเท่ากับ 1.1 กิโลเมตร โดยใช้ความถี่ 1,691 MHz และแยกช่องสัญญาณของภาพสำหรับแต่ละช่วงคลื่นของแถบสี การรับสัญญาณแบบ APT สามารถดัดแปลงได้จากเครื่องวิทยุสื่อสารและมีต้นทุนไม่สูงมากในการรับสัญญาณ แต่การรับสัญญาณแบบ HRPT จะต้องใช้อุปกรณ์เฉพาะที่มีราคาแพง ดาวเทียม NOAA ดวงที่เราจะสามารถรับได้ใน Mode APT ได้นั้นในปัจจุบันที่ยังใช้งานอยู่ เหลือเพียง 3 ดวง คือ NOAA 15, 18 และ 19 |
 |
|
ภาพที่ 1-1 ภาพถ่ายจากดาวเทียม NOAA 15 วันที่ 19 ตุลาคม 2560 |
| ตารางที่ 1-2 รายละเอียดของดาวเทียม NOAA 15, NOAA 18, NOAA 19 |
 |
|
2. ดาวเทียม NOAA โหมด APT |
|
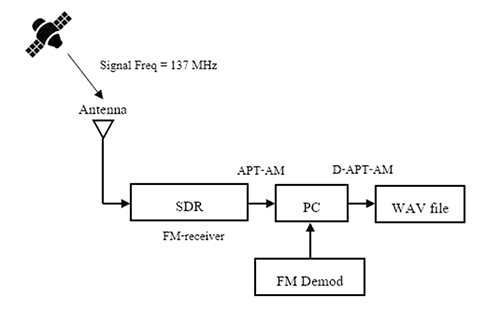
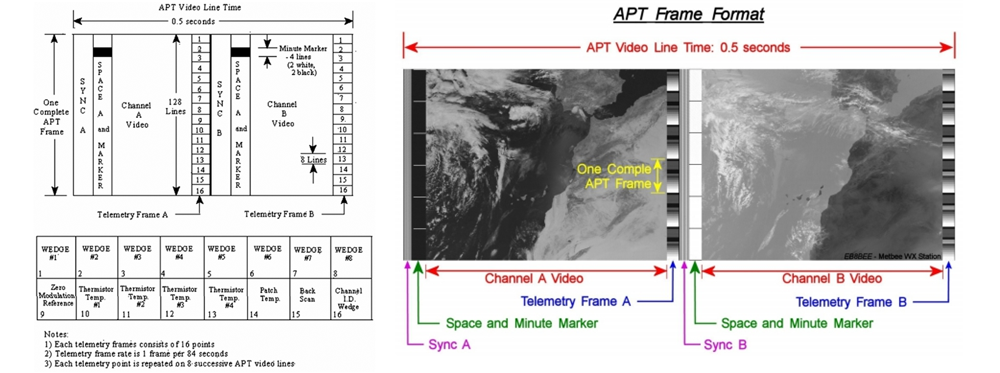
การส่งสัญญาณดาวเทียมของดาวเทียม NOAA ในโหมด APT จะส่งข้อมูลลงมา 2 ช่องสัญญาณ เป็นภาพขาวดำ ประกอบไปด้วย ช่องสัญญาณ A และ B หรือช่วงคลื่นที่ตามมองเห็น (Visible) และช่วงคลื่นอินฟาเรด (Infrared) โดย APT Video Line Time จะเท่ากับ 0.5 วินาที หลังจากนั้นก็จะแปลงสัญญาณดิจิทัล เป็นแอนะล็อก แล้วมอดูเลตแบบแอมปลิจูด (AM) มีแคเรียเท่ากับ 2.4 kHz และตามด้วยการมอดูเลตด้วยความถี่ (FM) ส่งมายังสถานีรับสัญญาณภาคพื้นดิน |
 |
|
ภาพที่ 2-1 โครงสร้างการถอดรหัสข้อมูลจากดาวเทียม NOAA |
 |
|
ภาพที่ 2-2 APT Frame Format |
 |
|
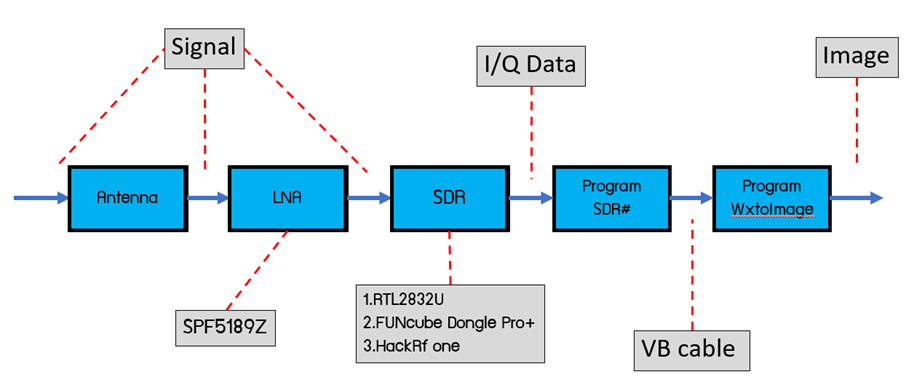
ภาพที่ 3-4 แสดงรายละเอียดขั้นตอนในการรับสัญญาณดาวเทียม NOAA โหมด APT |
|
3. ดาวเทียม NOAA โหมด HRPT |
| โหมด HRPT (The High Resolution Picture Transmission system) ส่งข้อมูลจากดาวเทียมด้วย Bit Rate = 665,400 bps ประกอบด้วยข้อมูลดิจิทัลที่ได้จากเซนเซอร์ AVHRR, ข้อมูล TIP และข้อมูล AMSU ซึ่งเป็นข้อมูลที่จำเป็นสำหรับนำไปตั้งค่าและปรับแต่งเอาต์พุต |
|
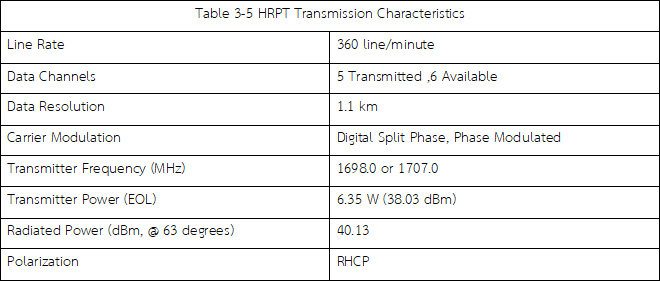
3.1 Transmission Characteristics (ลักษณะการส่งข้อมูล) การส่งสัญญาณ L-band ของมัลติเพล็กซ์ข้อมูลอยู่ใน Split Phase Format โดยที่ Split Phase Data 0 จะเป็น Phase +68 degrees ในช่วงครึ่งเวลาแรกของบิต และ -68 degrees ในช่วงครึ่งเวลาหลังของบิตและ Split Phase Data 1 จะเป็น Phase -68 degrees ในช่วงครึ่งเวลาแรกของบิต และ +68 degrees ในช่วงครึ่งเวลาหลังของบิต |
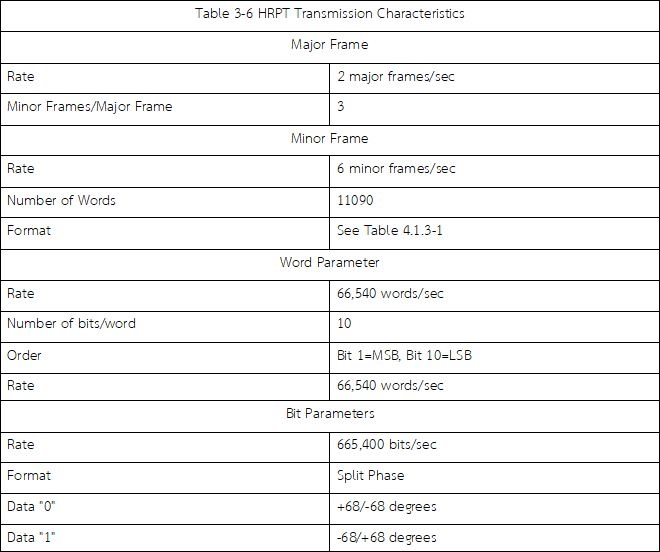
| ลักษณะทั่วไปของการส่งข้อมูลของระบบ HRPT แสดงดังตารางที่ 3-4 และตัวแปรที่เกี่ยวข้องของระบบแสดงดังตารางที่ 3-1 |
|
ตารางที่ 3-1 ลักษณะทั่วไปของการส่งข้อมูลของระบบ HRPT |
 |
|
ตารางที่ 3-2 ตัวแปรที่เกี่ยวข้องกับระบบ HRPT |
 |
|
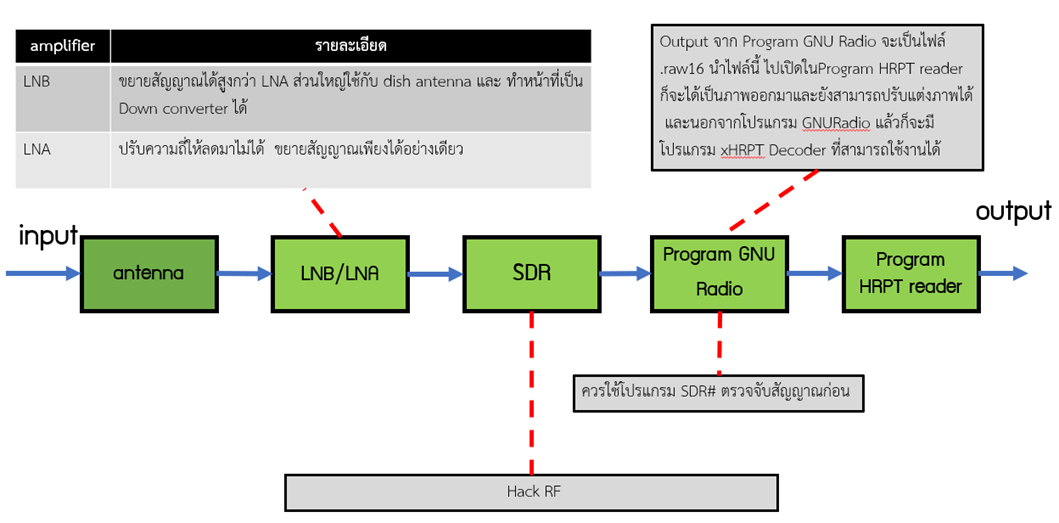
3.2 การทำงานของระบบรับสัญญาณ HRPT การทำงานของระบบรับสัญญาณโหมด HRPT มีความคล้ายคลึงกับของโหมด APT โดยข้อมูลของโหมด HRPT จะถูกส่งมาพร้อมกับข้อมูลในโหมด APT |
 |
|
ภาพที่ 3-1 ขั้นตอนในการรับสัญญาณดาวเทียม NOAA โหมด HRPT |
|
ข้อมูลจาก : เอกสารวิจัยโครงงานพัฒนาระบบต้นแบบสถานีรับสัญญาณข้อมูลดาวเทียมขนาดเล็ก โดย นายวสันชัย วงศ์สันติวนิช, นางสาว ปิยปาณ ค้าสุวรรณ, นางสาว วิลาสินี ปิ่นคล้าย, นาย ธนวัฒน์ ทองมั่นคง, นายปิยะณัฐ สุขสวัสดิ์ |
| ดาวโหลดเอกสาร |
- รายละเอียด
- หมวดหลัก: กองลาดตระเวนและเฝ้าตรวจทางอวกาศ
- หมวด: ความรู้ทางด้านเทคโนโลยีอวกาศ
 |
|
จรวดเชื้อเพลิงเหลวและเชื้อเพลิงแข็ง
|
|
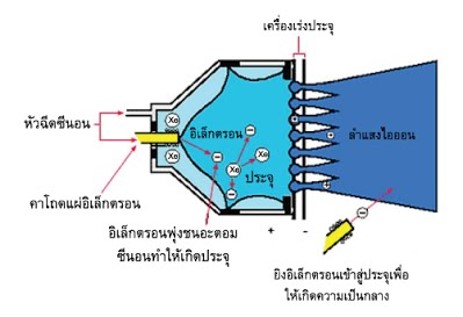
จรวดเชื้อเพลิงไอออน |
 |
| เรียบเรียงโดย : ร.อ.ชาคริต จันทมิตร |
- รายละเอียด
- หมวดหลัก: กองลาดตระเวนและเฝ้าตรวจทางอวกาศ
- หมวด: ความรู้ทางด้านเทคโนโลยีอวกาศ
|
การสื่อสารผ่านดาวเทียม (Satellite Communication) |
| ระบบการสื่อสารดาวเทียมนั้น กลายมาเป็นส่วนสำคัญของโครงสร้างของการสื่อสารคมนาคมในปัจจุบัน โดยสามารถให้บริการการสื่อสาร เช่น โทรศัพท์ผ่านดาวเทียม, อินเตอร์เนต, และการถ่ายทอดสดต่างๆ ซึ่งสามารถให้ทั่วโลกได้มากถึงพันล้านคน ถึงแม้ว่าขีดความสามารถของการสื่อสารผ่านเส้นใยแก้วนำแสงในปัจจุบันจะก้าวหน้าไปอย่างมาก แต่การสื่อสารผ่านดาวเทียมก็ยังคงมีความสำคัญและมีการพัฒนาเทคโนยีไปเรื่อย ๆ |
|
การสื่อสารผ่านดาวเทียมคืออะไร |
| จากคำนิยาม “Satellite” คือวัตถุที่โคจรรอบวัตุที่มีขนาดใหญ่กว่า ตัวอย่างของ Natural Satellite ก็คือดวงจันทร์ หรือดาวเคราะห์ต่าง ๆ |
 |
|
ที่มา: https://steemkr.com/news/@zairawasim/natural-satellite |
| เพราะฉะนั้นการสื่อสารผ่านดามเทียม ก็คือระบบการสื่อสารที่รองรับการเชื่อมต่อผ่านระบบวิทยุ เพื่อจำเป็นต่อการเชื่อมต่อสื่อสารจากจุด ๆ หนึ่ง บนความหลากหลายของภูมิประเทศ |
 |
|
การสื่อสารผ่านดาวเทียม - สื่อสารผ่านวัตถุโคจรในอวกาศ - รับสัญญาณคลื่นไมโครเวฟจากจุดบนโลก - แปลงสัญญาณความถี่ของสัญณาณที่ได้รับ ส่งสัญญาณไปยังอีกจุดหนึ่งบนโลก |
|
การสื่อสารผ่านดาวเทียมจำเป็นต่อ… |
|
- การสื่อสารระหว่างทวีปเป็นไปได้ยาก และการลงทุนโยงสายมีราคาสูง - ปริมาณของการใช้งานในพื้นที่ห่างไกลระหว่างทวีปทำให้การให้บริการการสื่อสารผ่านดาวเทียมในเชิงพาณิชย์เป็นที่น่าสนใจ - การสื่อสารผ่านดาวเทียมครอบคลุมบริเวณกว้าง ซึ่งจะเป็นประโยชน์สำหรับพื้นที่ที่มีประชากรน้อย - การสื่อสารผ่านดาวเทียมเหมาะสำหรับใช้งานในพื้นที่กันดาร ที่ที่ซึ่งไม่มีการสื่อสารอื่น ๆ เข้าถึงได้ |
| เรียบเรียงโดย : ร.ท.สุทธิพงษ์ โตสงวน |